





Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

The commissioning of the motor drive control system often requires viewing the control signals and power waveforms that occur simultaneously in the dynamic event, thereby understanding the causal relationship, visualizing the dynamic power behavior over time, and the association with the control signals. Traditional power analyzers only provide static power (average) measurement capability, very limited waveform capture capability, and cannot measure control signals. The Teledyne Lecroy MDA810 Motor Drive Analyzer provides static power measurement and dynamic power analysis with full embedded control measurement capability to correlate control signals with power events.
The following example demonstrates the measurement of a small handheld tool using the Teledyne LeCroy MDA810 motor drive analyzer, which uses a sinusoidally modulated permanent magnet synchronous motor operating in a high speed mode. The direction of the motor is reversed once per second. This measurement verifies the correlation between the behavior of the drive control signal and the tool and the dynamic power behavior, including the power dissipation during the direction transition and the difference in power consumption in each direction of rotation. The goal is to understand and reduce the unnecessary power consumption during this period. If the power consumption is too high, it may lead to user dissatisfaction and other reliability issues.
View control signals and speed commands/feedback signalsThe example in Figure 1 shows the use of five 12-bit, 1 GHz acquisition channels to view two control signals (C1 and C2), the wheel's coded position signal (C3), the motor's actual speed (C4) and control speed (C5). The test engineer designed an external control board to process the signals of C3 and C4. This is because this motor is a sensorless motor. This external control board is for testing purposes only and is not part of the final product.
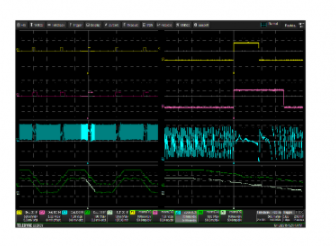
Figure 1 Acquiring the position, speed and control signals of the sensorless motor
The signals of channel 1 and channel 2 are the control signals for the direction of rotation of the motor control. The rising edge of channel 1 initiates the reverse rotation of the motor, and the falling edge of channel 2 indicates the end of the reverse rotation of the motor. Collect long-term data (5s in this example) and see a lot of conversion cycles. The amplified waveform (in the right raster) shows the details of one of the conversion processes, showing the timing of the control signal and motor response. At the same time, the change in speed during the transition is monitored, as shown by Z4 and Z5. From these signals, it can be seen that the reverse rotation of the motor is normal and consistent with expectations.
Motor drive output power analysisIn this example, the motor-driven data is analyzed using a two-watt calculation to calculate the three-phase power value.
Figure 2 shows the probe connection method for the two watt calculation method.

Figure 2 Motor Drive Connection Settings - Two Watts Calculation
The two watt calculation allows the power of a three-phase system to be calculated using only four signals, leaving more channels to capture other drive control signals or power behavior signals. The MDA810 also supports the three watt calculation method. Two high-voltage differential probes (C1, yellow waveform, and C2, red waveform) and two current probes (C5 and C6, green waveform, purple waveform) are connected to the drive motor as described in the circuit configuration diagram in Figure 2. Output.
Voltage and line current waveforms. The phase difference between the voltage waveform and the line current waveform of the line is 120 degrees, which is consistent with the expectations of the three-phase system. The waveform on the right side of Figure 3 is an enlargement of the left waveform. No amplification waveform shows a lot of noise, but the amplified waveform shows that noise is caused by the characteristics of the drive output switching device. Using a traditional 8-bit oscilloscope is not observable, but the MDA810 12-bit acquisition system has the resolution needed to observe this detail.

Figure 3 Acquisition line voltage and line current
Then, as shown in Figure 4, collect a piece of data for a long time, view the complete change in the direction of motor rotation, and calculate the power before, during, and after the change in direction. Of particular interest is the energy consumed in the transition from one direction to the other. The ideal situation is that there is no sharp increase in energy at this turning point. This acquisition involves two motor direction transitions.

Figure 4 Acquisition of motor direction conversion process
To determine the cycle time required for all voltage, current, and power calculations, a signal is selected as the "reference period." In the MDA810, this is called a "synchronous" signal. The synchronization signal determines the calculated measurement interval for each cycle of voltage, current, power, efficiency, mechanical parameters, and other values. This usually requires filtering out the high frequency components in the sync signal. Get better periodicity, in the MDA810, it's very simple to implement.
Contactar proveedor

Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.